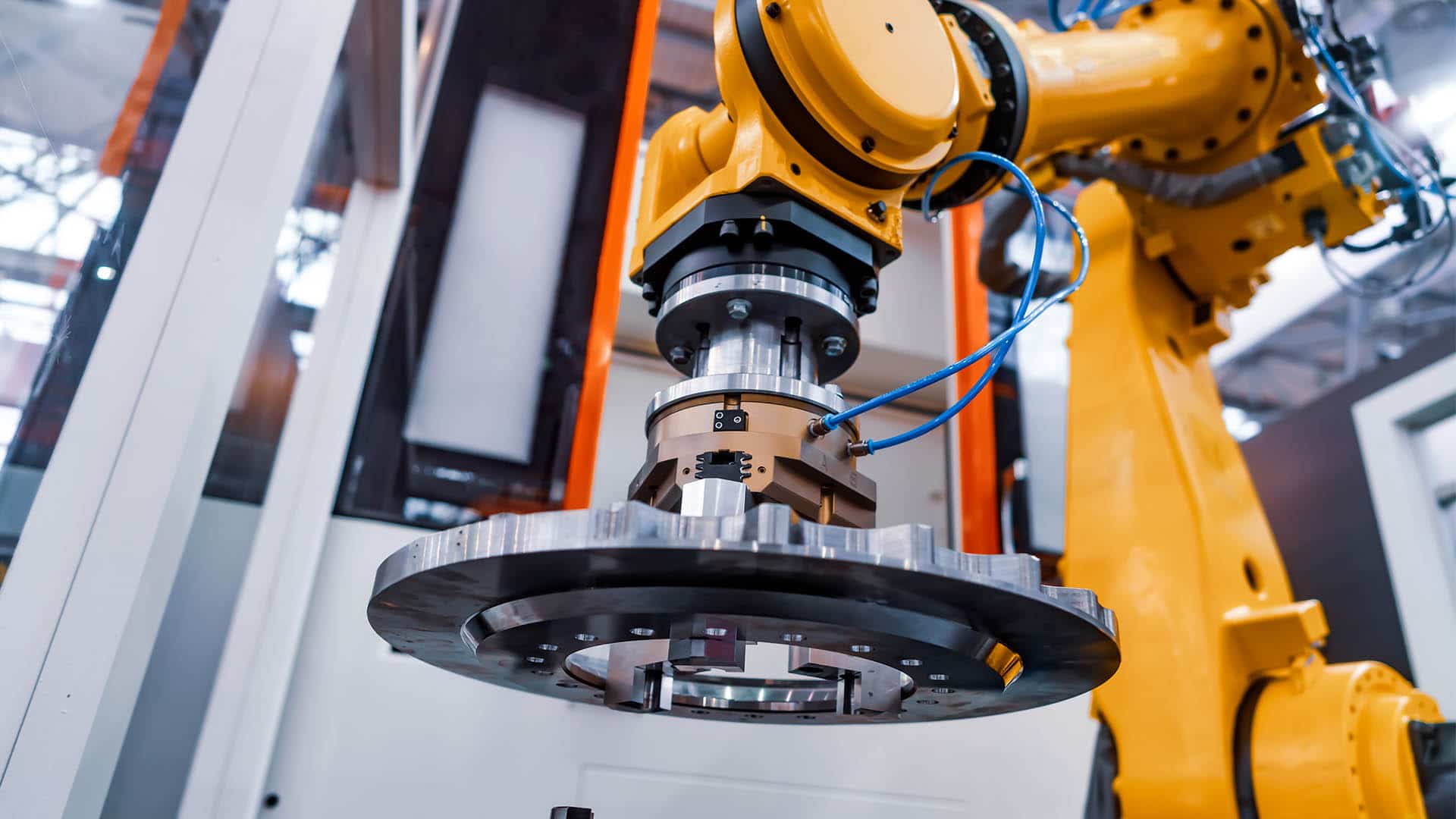
Robot grippers are at the heart of industrial automation, playing a crucial role in the seamless operation of manufacturing processes. These mechanical hands are responsible for precisely handling, manipulating, and placing various objects, ranging from delicate electronics to heavy machinery components.
As industries increasingly rely on automation to improve efficiency and reduce costs, optimising robot grippers becomes a significant factor in achieving these goals.
The complexity of tasks in industrial applications demands grippers that are robust and adaptable to various conditions. The choice of gripper type, material, and integration with advanced technologies such as sensors and AI directly influences the performance of these robotic systems.
In this blog, we explore the different aspects of optimising robot grippers for complex industrial applications, focusing on the latest innovations and best practices in the field.
Understanding the Types of Robot Grippers
Robot grippers come in various designs, each suited to different industrial tasks. Mechanical grippers, for instance, use fingers or claws to grip objects and are commonly used in applications requiring firm and precise handling, such as assembly lines.
Vacuum grippers, on the other hand, are ideal for picking up flat and non-porous items, making them perfect for industries like packaging. Magnetic grippers are typically employed in handling metallic components, while adhesive grippers are used in delicate operations, such as in the electronics industry.
Each gripper type has its own advantages and limitations. Mechanical grippers offer strength and precision but may struggle with fragile items. Vacuum grippers are versatile but may not work well with porous materials. Magnetic grippers are powerful but limited to ferromagnetic objects.
Adhesive grippers, while gentle, may have issues with residue or wear over time. Understanding these nuances is key to selecting the right gripper for the task, ensuring that the automation process runs smoothly and efficiently.
Material Considerations for Gripper Design
The choice of materials in the construction of robot grippers is critical for their performance in industrial applications. High-strength alloys, such as titanium or stainless steel, are often used in mechanical grippers for their durability and resistance to wear, especially in heavy-duty environments.
However, the weight of these materials can be a drawback in high-speed operations. In such cases, lightweight composites or advanced polymers are preferred, as they offer a good balance between strength and agility.
Material selection also affects the gripper’s interaction with the objects it handles. For example, grippers designed for handling delicate items might incorporate soft materials like silicone or rubber to provide a gentle touch, reducing the risk of damage.
On the other hand, grippers used in high-temperature environments might require heat-resistant materials like ceramic composites. Therefore, material considerations are not just about durability, but also about optimising the gripper’s performance for specific industrial tasks.
Customisation for Specific Applications
Customisation of robot grippers is often necessary to meet the unique demands of specific industrial applications. Off-the-shelf grippers may not always provide the required precision, speed, or adaptability for complex tasks.
For instance, a gripper used in the automotive industry might need to handle a wide variety of parts with different shapes and weights. Custom-designed grippers can address these challenges by incorporating specific features, such as adjustable grip strength, multi-fingered designs, or specialised gripping surfaces.
Case studies in industries such as aerospace and pharmaceuticals demonstrate the value of custom grippers. In aerospace, custom grippers are used to handle large, irregularly shaped components with high precision, while in pharmaceuticals, grippers are tailored to manage sterile environments and delicate packaging.
By investing in customisation, industries can significantly enhance the efficiency and accuracy of their robotic systems, ultimately leading to higher productivity and lower operational costs.
Integrating Sensors and AI
The integration of sensors into robot grippers has revolutionised their capabilities, allowing for real-time feedback and adjustments during operation. Force sensors, for example, enable grippers to measure the amount of pressure applied, ensuring that fragile items are not damaged during handling.
Proximity sensors help in precise positioning, making it easier for the gripper to align correctly with the object. These sensors not only improve the accuracy of the gripper but also contribute to the overall safety of the automation process.
Artificial Intelligence (AI) takes this a step further by enabling grippers to learn and adapt to new tasks. Through machine learning algorithms, AI can analyse data from sensors to optimise gripping techniques, predict maintenance needs, and even suggest design improvements for future grippers.
This adaptability is particularly valuable in industries with high variability in tasks, such as electronics manufacturing, where grippers must handle components of different sizes, shapes, and materials. The combination of sensors and AI thus enhances the flexibility and efficiency of robot grippers in complex industrial environments.
Maintenance and Longevity
Maintaining robot grippers is crucial for ensuring their long-term performance and reliability in industrial settings. Regular inspections and preventive maintenance can identify potential issues, such as wear and tear on gripping surfaces or degradation of sensor accuracy before they lead to costly downtime.
Implementing a maintenance schedule that includes cleaning, lubrication, and calibration can significantly extend the lifespan of grippers, ensuring they remain in optimal condition for demanding applications.
In addition to routine maintenance, the longevity of robot grippers can be enhanced through design considerations. Using wear-resistant materials, incorporating redundant sensors, and designing for easy component replacement are all strategies that can improve durability.
Industries that invest in robust maintenance practices and thoughtful design can reduce the frequency of gripper replacements, leading to lower operational costs and improved uptime for their robotic systems.
Conclusion
Optimising robot grippers for complex industrial applications is a multifaceted process that requires careful consideration of gripper type, material selection, customisation, and the integration of advanced technologies like sensors and AI.
By addressing these factors, industries can significantly improve the performance, reliability, and efficiency of their robotic systems, ultimately enhancing their overall productivity.
As industrial automation continues to evolve, the role of robot grippers will only become more critical. Investing in the optimisation of these essential tools not only meets the current demands of manufacturing but also prepares industries for the future, where flexibility, precision, and adaptability will be key to success.
For those looking to enhance their automation processes, exploring customised gripper solutions and advanced integration options is a strategic step forward.